Научно-технический центр "Интеллектуальные электронно-механические системы"


Инжиниринговые услуги в разработке и изготовлении силовой электроники и электромеханики
Высокоточный
безредукторный индукторной
электропривод в следящих системах
Традиционная
система слежения (СС) включает в себя:
-
электродвигатель (ЭД);
- редуктор (Р);
-
исполнительный механизм (ИМ) с
преобразователем (датчиком) положения (ДП);
- устройство управления (УУ).
Информация о заданном (требуемом) положении ИМ поступает с внешней системы управления на УУ , одновременно на УУ поступает информация о текущем положении ИМ с ДП. УУ формирует такие управляющие токи для ЭД, чтобы свести к нулю разность между заданным и текущим положениями ИМ.
Структурная схема СС, обеспечивающая точное угловое положение ИМ, приведена на рис.1.
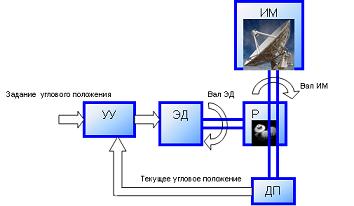
Рисунок 1
Одним
из основных
элементов, ограничивающих ее надежность,
точность, скорость установки (наведения), является
механический редуктор, которому присущи такие недостатки как:
- люфт в
зацеплении шестерен, для его уменьшения необходимо применять
специальные меры;
- износ
шестерен и подшипников;
- малая
ударостойкость;
- шумность при
работе;
- момент
инерции вращающихся деталей;
-
зависимость характеристик от
температуры;
-
потери мощности на трение в сопрягаемых
деталях;
-
склонность к заклиниванию;
- масса и
габариты.
Момент
инерции вращающихся деталей редуктора
добавляется к моменту инерции ИМ,
следовательно, для увеличения быстродействия
СС необходимо применять более мощные ЭД.
Наличие люфтов в Р ограничивает
точность СС.
Существенно
повысить технические характеристики
машин, реализованных на основе СС, можно
отказавшись от использования
механического редуктора, заменив
механическую редукцию на электрическую.
С такой задачей сможет справиться
индукторная электрическая машина.
Применение индукторного ЭД (ИД) в
следящей системе позволяет фиксировать
ротор в любом произвольном требуемом
положении, задавая необходимое
соотношение значений токов в соседних
фазных обмотках – электрическое
дробление шага. Это позволяет
существенно увеличить точность и
быстродействие следящих систем. При
этом повышается устойчивость объекта
управления при отработке внешних
возмущающих воздействий (порывы ветра, качка, тряска,
механические удары и т.п.
Если
осуществлять ориентацию объекта
управления (антенны, платформы и т.п.) без
механического редуктора с использованием
ИД большого диаметра, то точность
позиционирования может быть
существенно увеличена, и ограничиваться
лишь прецизионными характеристиками
подшипниковых узлов объекта управления
и точностью ДП. При этом ДП может
выполнять две функции одновременно -
датчика положения ИМ и датчика
положения ротора ИД для управления
током в фазных катушках.
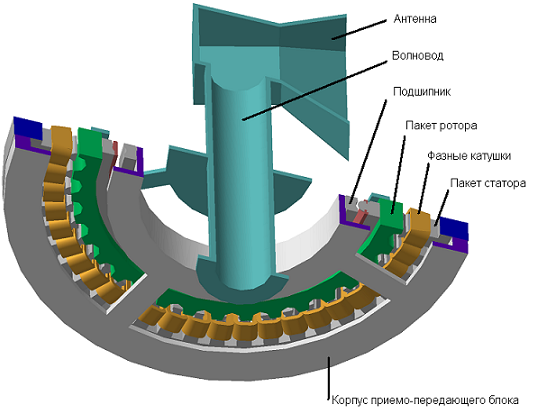
Пассивный
зубчатый венец ротора ИД может быть
выполнен как составная часть ИМ, а зубцы
статора с обмотками могут быть
размещены непосредственно в корпусе
устройства. В результате этого
ИД как обособленная конструктивная
единица перестает существовать, что резко улучшает
массогабаритные и динамические
показатели объекта.
Схематично
пример использования ИД большого
диаметра в системе слежения радиолокатора показан на рисунке
2.
 |
 |
Рисунок 2
При
такой конструкции не используются
механически зацепленные элементы, а,
следовательно, при механических возмущающих
факторах (удар), превышающих допустимые
значения, будет происходить лишь
проскальзывание ротора в магнитном поле статора, без
выхода из строя механической и
электрической частей системы.
Динамические и статические требования к объекту управления определяют мощность ИД СС . Чем больше масса объекта вращения и скорость отработки задания, тем более мощный привод требуется .
В режиме
разгона ИД потребляет электроэнергию от
источника питания. При торможении ИД может возвращать накопленную энергию
в источник питания (рекуперативное
торможение), либо тормозить за счет
потребления дополнительной энергии от
источника питания.
Рекуперативное
торможение с сохранением высвобожденной энергии
позволяет
существенно снизить энергопотребление
и нагрузку на питающую сеть объекта в
старт-стопных режимах работы.
Обеспечение необходимых значений токов в фазных обмотках в различных режимах работы ИД осуществляется фазными инверторами посредством широтно-импульсной модуляции.
УУ
ИД целесообразно
реализовать на основе
специализированного микроконтроллера,
который может с достаточным
быстродействием осуществлять обработку
сигналов в цифровом виде. Применение в
УУ микроконтроллера
позволяет:
·
существенно
упростить, удешевить конструкцию и уменьшить энергопотребление
·
использовать
адаптивные алгоритмы управления, что
значительно улучшает быстродействие СС;
·
производить
адаптацию одного типа электропривода к
исполнительным механизмам с различными
механическими характеристиками путем
оперативного изменения
программного обеспечения
контроллера;
·
подключаться
к персональному компьютеру через
внешний разъем, и отлаживать, загружать в
контроллер программное обеспечение,
отображать на дисплее компьютера
состояние системы в динамическом режиме;
·
реализовывать
значительный набор защитных функций СС,
что позволяет повысить ее надежность.
Когда
необходимо получить линейное
перемещение исполнительного механизма,
тогда вращательное движение ротора
ИД можно преобразовать в линейное посредством передачи
"винт-гайка" встроенной в полый вал ИД.
При
использовании шарико-винтовой пары КПД
механической передачи составит 90-95%.
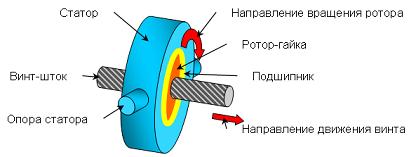
Рисунок 3
Используя линейный тип ИД, схематично
изображенный на рис.4, можно обеспечить
лучшее быстродействие и точность, но
такая конструкция уступает предыдущей в
развиваемом осевом усилии.
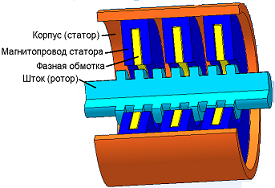
Рисунок 4
Следящие системы могут контролировать не только положение, но и другие физические величины, например, вращающий момент.
Схема безредукторного электромеханического усилителя с ИД показана на рисунке 5.
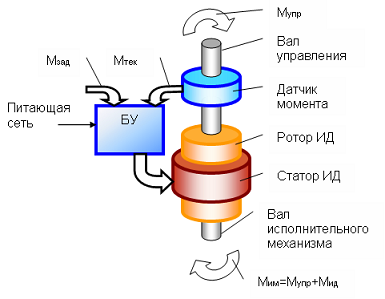
Рисунок 5
Входной
(управляющий) момент (Мупр)
прикладывается к валу управления.
Датчик момента (ДМ) преобразует текущее
значение момента (Мтек) в электрический
сигнал. Мтек это разница между моментами,
создаваемым исполнительным механизмом (Мим)
и Мупр. Если Мтек больше, чем заданный
порог Мзад, то блок управления (БУ)
подает такой ток на фазные катушки ИД,
чтобы момент, создаваемый ИД (Мид),
уменьшил Мтек. Таким образом, к
исполнительному механизму
прикладывается выходной момент равный
сумме моментов Мупр и Мид.
Если
ИМ присоединить к валу управления, то
тогда к ИМ будет прикладываться момент,
задаваемый по входу Мзад.
Электромеханический усилитель в таком
включении превращается в
преобразователь электрического сигнала
во вращающий момент.
Для получения линейного момента требуется либо линейный ИД, либо механическая передача "винт-гайка".
С
одной стороны техника становится все
более сложной и энерговооруженной, а с
другой - она должна быть более
эргономичной, легкой в управлении, оставаться максимально
надежной. Эти тенденции будут определять
возрастающий
спрос на надёжные электромеханические
исполнительные механизмы. Так, в авиации
сначала потребовался гидропривод, а
сегодня наметилась устойчивая
тенденция к переходу на
электромеханический привод.
В авиационной технике особые проблемы создают механические редукторы. "Износ зубчатых пар может со временем давать неприемлемый люфт, снижающий качество управления и способный вызвать флаттер (дребезг). Существует вероятность заклинивания в любом из многочисленных механических контактов зубчатых пар и подшипников. Простое введение избыточности за счет дублирования привода еще больше увеличивает вероятность заклинивания закрылков, потому что каждый привод заклинивает весь закрылок целиком.
Традиционные решения — срезные штифты или муфты либо невосстановимы, что снижает коэффициент готовности воздушного судна и требует высоких затрат на обслуживание, либо увеличивают массу системы, что делает их неприемлемыми для решения проблемы заклинивания".
Актуальность электрификации авиации признается на правительственном уровне. Российское правительство планирует выделить из федерального бюджета на развитие отечественного авиапрома 1,2 трлн руб. в 2013–2025 г. Министр промышленности и торговли Денис Мантуров отметил, что государство будет поддерживать проект самолета МС-21, перспективного скоростного и легкого вертолетов, двигателя ПД-14, а также самолета, в котором большинство традиционных систем будут заменены на электрические.
В
автомобилестроении электромеханические
усилители постепенно отвоевывают долю
рынка у гидравлических.
Примером
успешной конкуренции являются
электроусилители руля, которые
потеснили гидравлические в легковых
автомобилях, причиной
тому являются их характерные особенности:
- существенно более высокая точность выполнения заданного алгоритма управления;
- информативность рулевого управления (адаптация алгоритма управления к скорости автомобиля);
-
повышенное быстродействие (нет
временной задержки связанной с подачей
жидкости для создания необходимого
давления в гидроцилиндре);
- независимость работы усилителя от оборотов двигателя автомобиля (необходимая мощность отбирается от бортовой сети со стабильным напряжением);
- независимость работы усилителя руля от температурных перепадов (вязкость гидравлической жидкости (масла) существенно зависит от температуры);
- экономичность (потребляет энергию только при вращении руля, в отличие от гидроусилителя, который вынужден постоянно поддерживать номинальное давление в гидросистеме, КПД электродвигателя с редуктором выше, чем КПД гидронасоса, что позволяет экономить 3—5 % топлива);
- более высокая надежность (отсутствуют ненадежные резиновые шланги, ремни, прокладки, сальники…)
- нет затрат на обслуживание (замена и доливки рабочей жидкости, контроль и устранение причин ее утечки);
- высокая технологичность в производстве и ремонтопригодность в эксплуатации (удачно вписывается в блочно-модульную концепцию автомобиля);
- низкая стоимость (дешевле в полтора раза, чем гидроусилитель).
Отечественные ВАЗ-ы уже оснащаются электромеханическими усилителями руля (ЭМУР) с редукторными ИД и безредукторными ЭД с постоянными магнитами на роторе.
К усилию в 10 Н*м, прикладываемому к рулевому колесу, они добавляют 30 Н*м от электропривода.
В случае выхода из строя блока управления, ЭМУР с индукторной электрической машиной продолжает передавать усилия с рулевого колеса, но с некоторым дополнительным моментом, необходимым для проворачивания червячной передачи редуктора и ротора электродвигателя, а безредукторный ЭМУР может потребовать дополнительного усилия при выходе из строя ключей инвертора. При этом автомобиль не теряет управления.
Таким образом, электромеханические усилители и следящие системы, реализованные на безредукторных электроприводах (индукторных или с постоянными магнитами), будут находить все большее применение в различных областях техники.
При использовании этого материала ссылка на источник обязательна.
![]()
Области применения:
- радиолокация
-системы спутниковой связи
- станкостроение
- транспорт
- управление запорной арматурой
- технологическое оборудование
|
О компании |
| Разработка |
| Изготовление |
| Испытания |
| Поставки |
| Заказать |
| Контакты |
Информация:
"Экономика и индукторный электропривод"
"Высокоточный безредукторный индукторный электропривод в следящих системах"
Конструкция электромеханического усилителя рулевого управления

Внешний вид электроусилителя руля с индукторным двигателем автомобиля семейства
"ВАЗ"
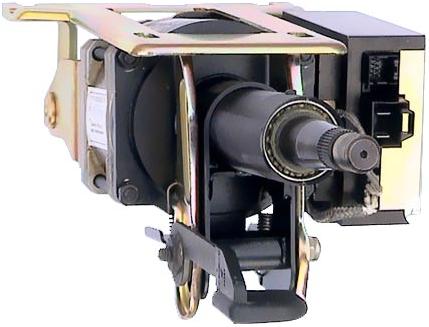
Безредукторный ЭМУР с постоянными магнитами на роторе электродвигателя автомобиля ВАЗ-2110
